Role: Project Kit Designer and Developer
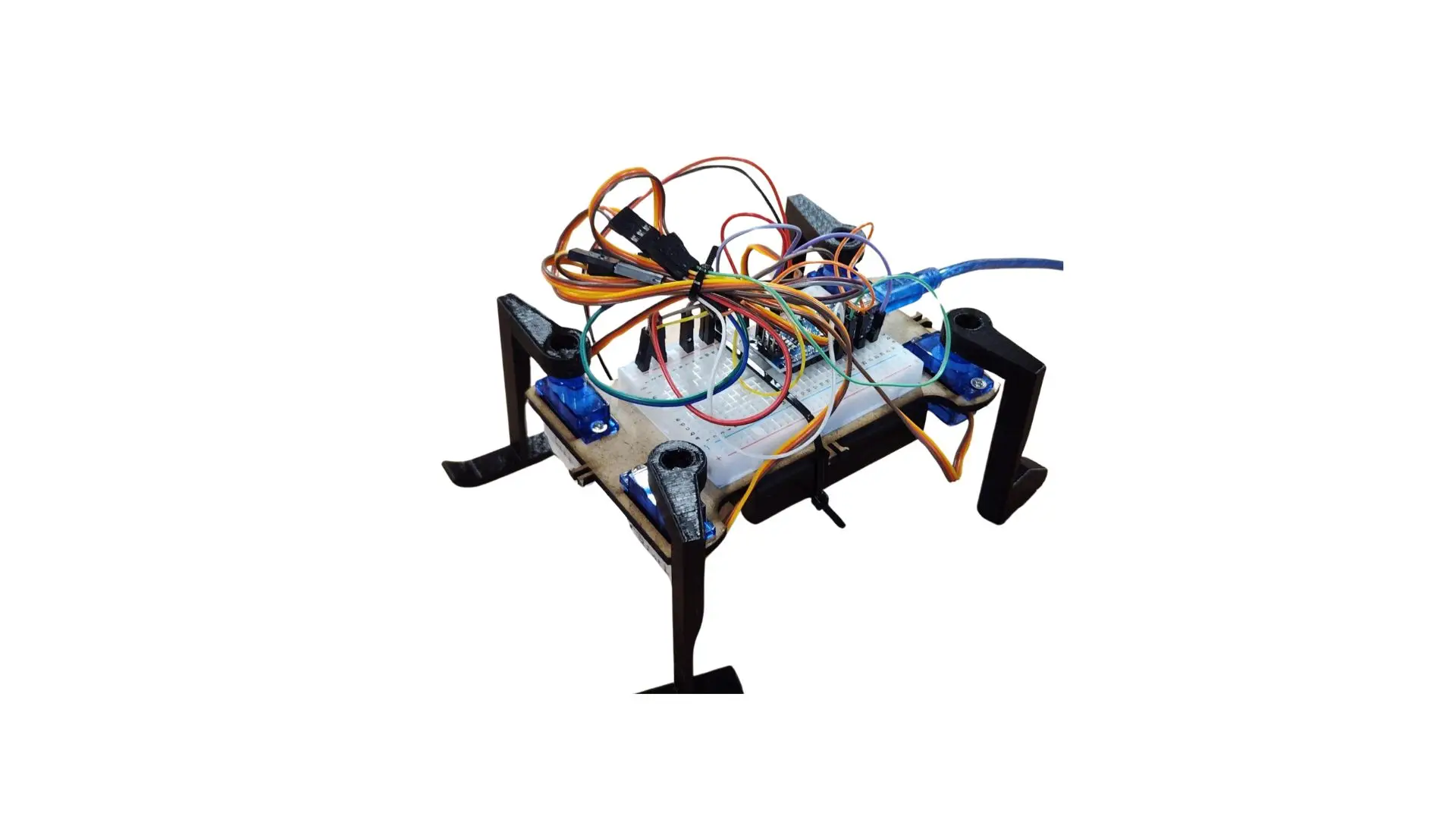
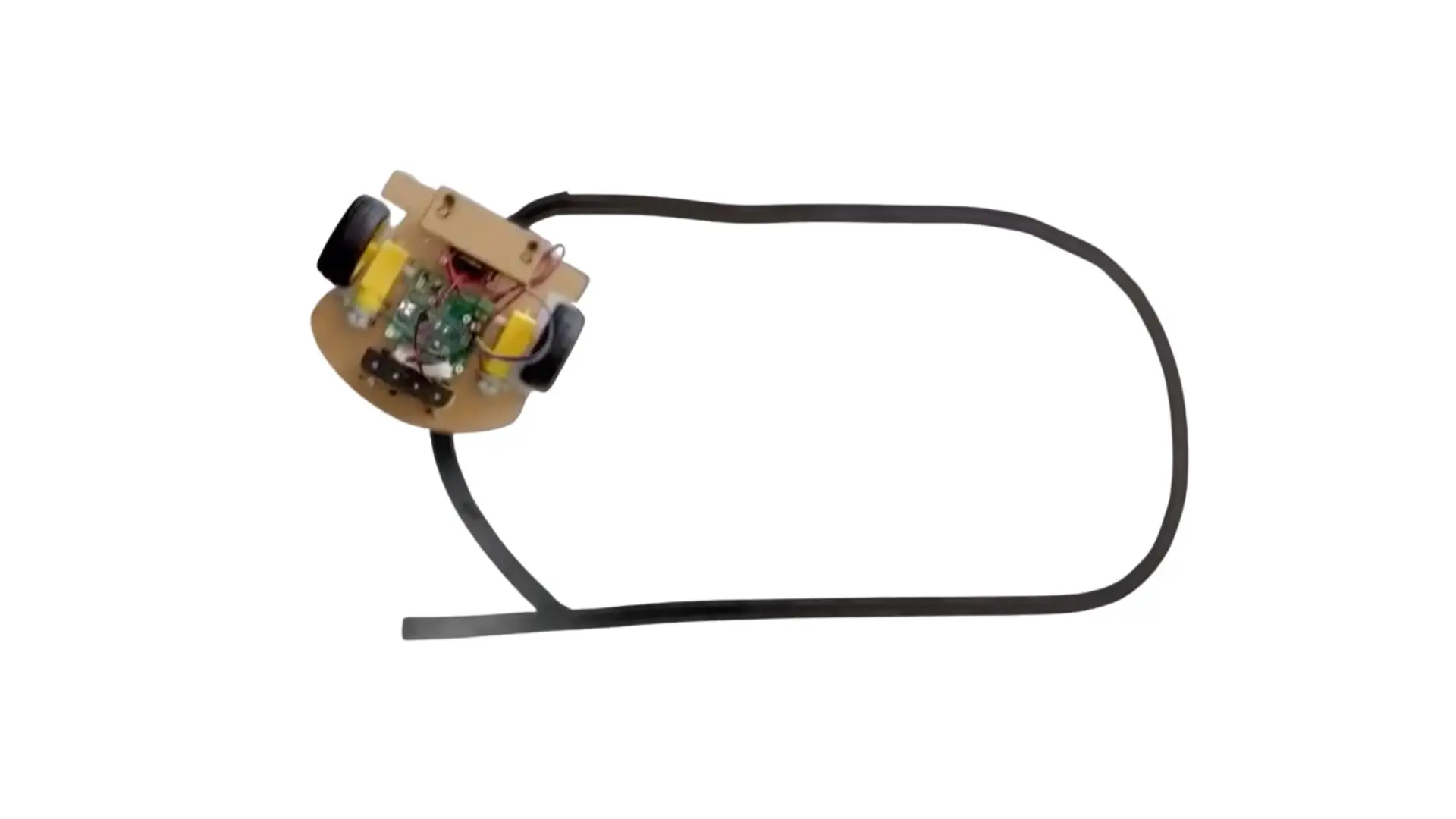
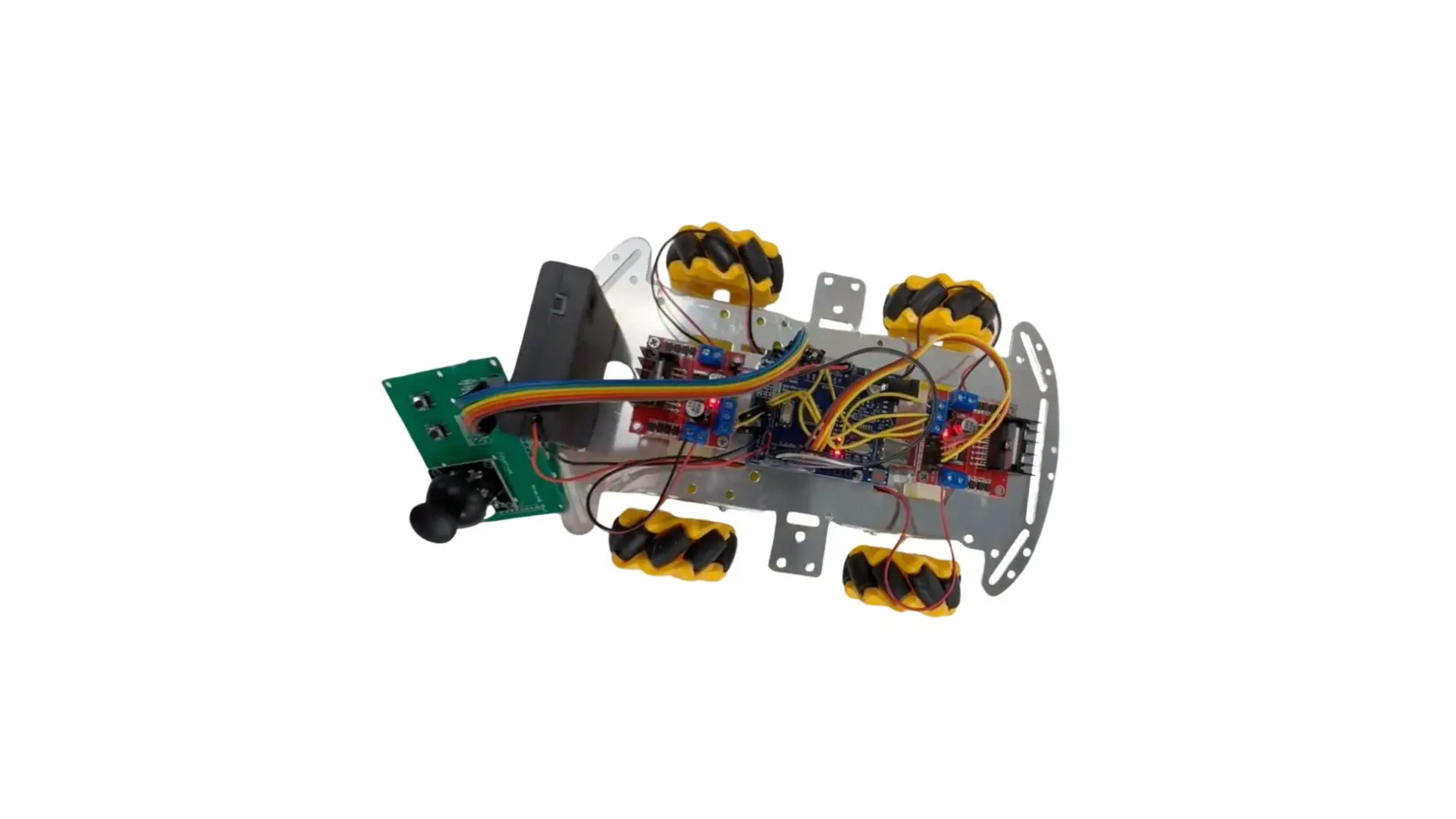
Designed a robotics project focused on autonomous navigation using color-contrast line tracking. The robot was equipped with sensors that detected changes in surface color, allowing it to follow a predefined path.
Learning Objectives:
- Programmed Arduino microcontrollers to interpret sensor input.
- Controlled motor behavior based on real-time sensor data.
- Explored sensor calibration and basic autonomous movement algorithms.
Outcome:
Students learned how to integrate sensors and code logical behavior for responsive robotics, gaining foundational skills in robotics navigation and sensor-based decision making.