Role: Project Kit Designer and Developer
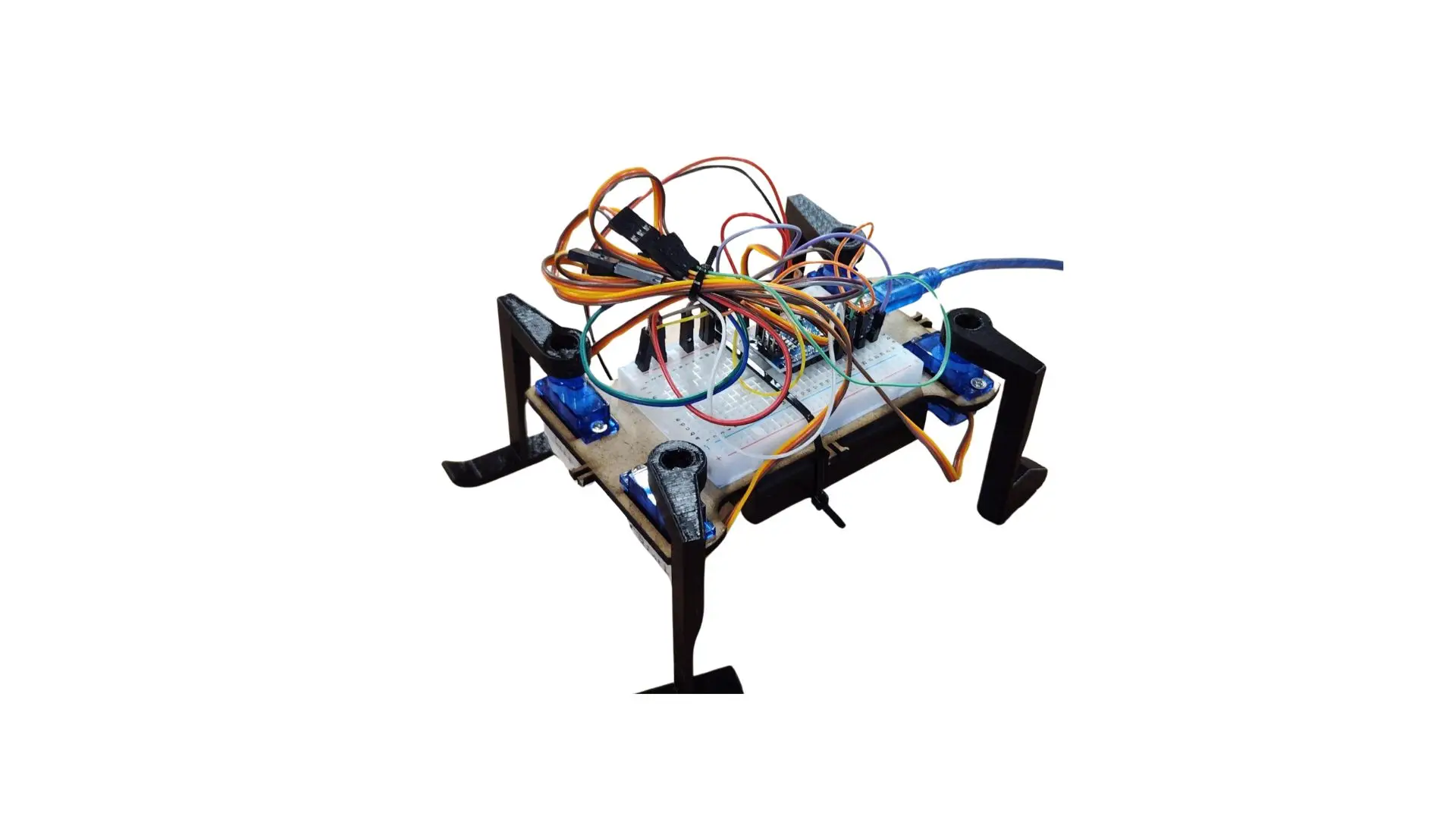
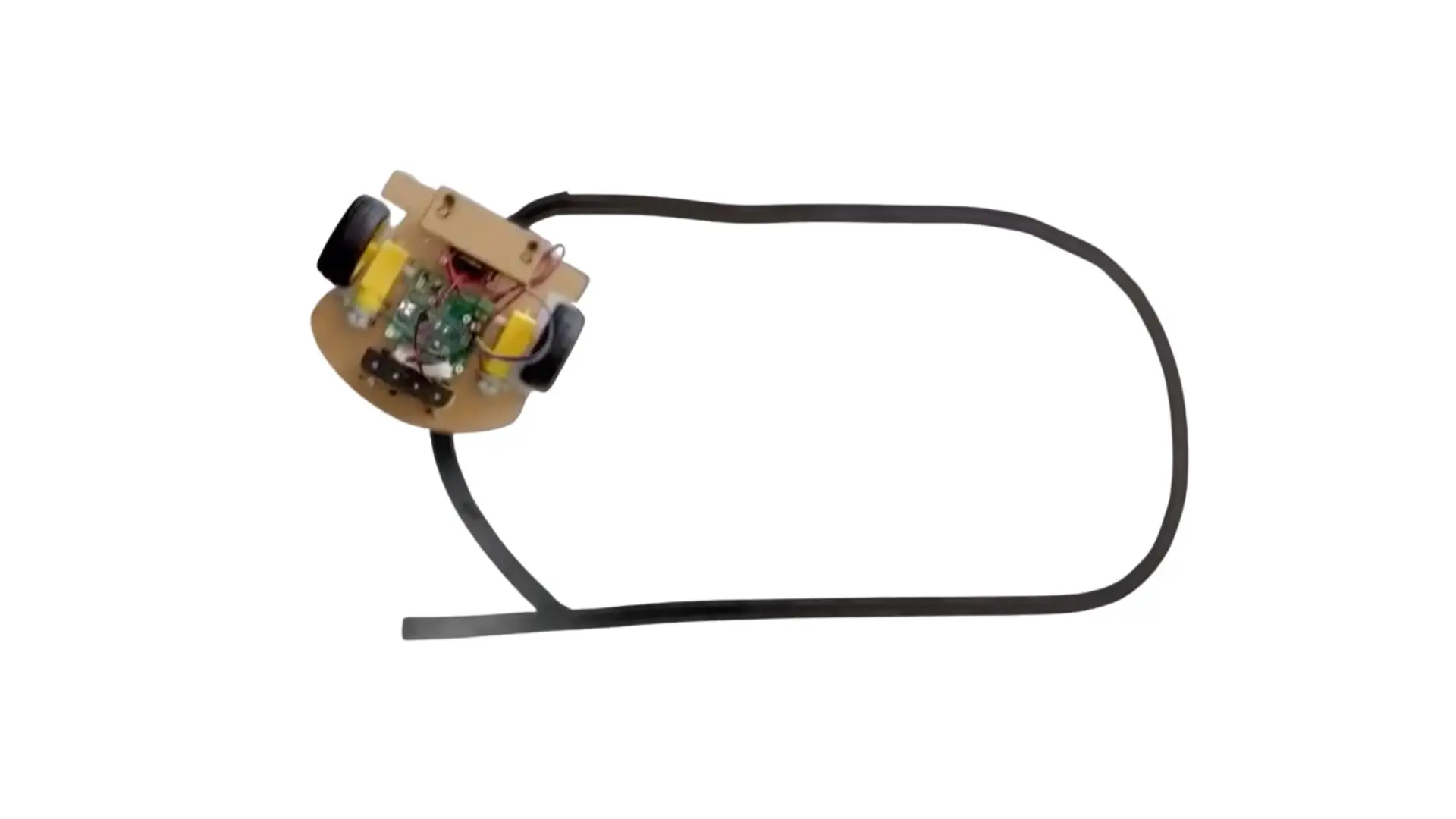
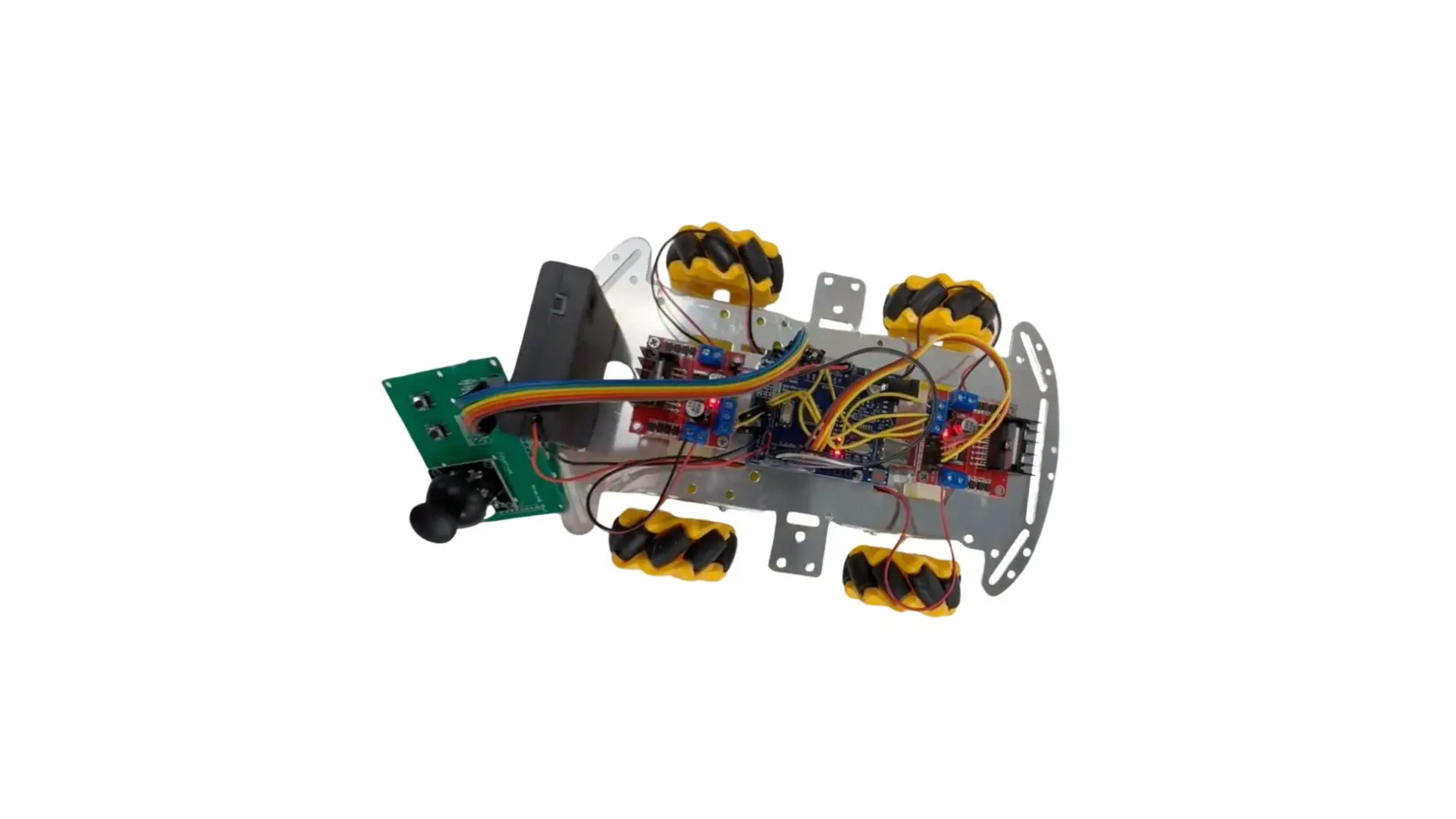
Developed a hands-on robotics project to introduce students to the mechanics of omni-directional movement using Mecanum wheels. The project involved assembling and controlling a remote-operated vehicle capable of moving forward, backward, sideways, and diagonally.
Learning Objectives:
- Explored the function and design of Mecanum wheels
- Built and tested a remote-controlled vehicle with multi-directional movement
- Gained understanding of motor coordination and directional logic in robotics
Outcome:
Students gained practical experience in advanced mobility systems and expanded their knowledge of robotics mechanics through an engaging, movement-focused build.